Mit dem aktuellen Software-Release für unseren Stereo-Vision-Sensor SP1 ist es nun möglich, MATLAB zur Verarbeitung der erfassten 3D-Tiefendaten in Echtzeit zu verwenden.
Mit dem Stereo-Vision-Sensor SP1 ermöglicht Nerian Vision Technologies die schnelle und genaue Erfassung von 3D-Tiefendaten, selbst unter schwierigen Beleuchtungsbedingungen. Die Erfassung von 3D-Daten ist jedoch nur der erste Schritt in einer typischen 3D-Machine-Vision-Anwendung. Um die Datenanalyse für unsere Kunden zu vereinfachen, haben wir die einfache Integration in bestehende Standardsoftware zu einer unserer Prioritäten gemacht. Das SP1 kann bereits leicht in HALCON von MVTec integriert werden, und es gibt ein offizielles Modul für das Robot Operating System (ROS), das in der Robotik-Forschungsgemeinschaft sehr beliebt ist.
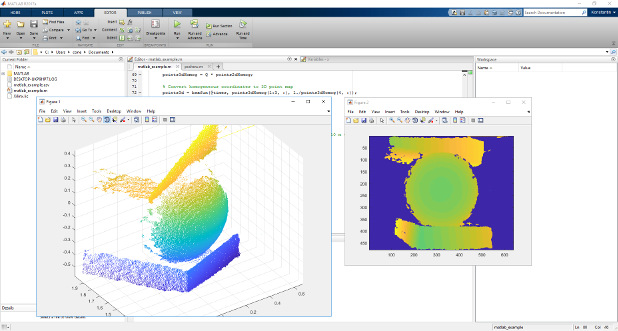
Ab heute unterstützen wir offiziell eine weitere weit verbreitete Standardsoftware: MATLAB von Mathworks. Durch die Verbesserung unseres GenTL-kompatiblen Treibers ist es nun möglich, MATLAB für den Zugriff auf die Live-Daten unseres Stereo-Vision-Sensors zu verwenden. Um diese Funktionalität nutzen zu können, sind die Image Acquisition Toolbox und der GenTL-Adapter von MATLAB erforderlich. In unserem aktuellen Software-Release finden Sie eine Beispielanwendung, die demonstriert, wie MATLAB zur Datenerfassung und Visualisierung eingesetzt werden kann.
Mit unserem neuen GenTL-Treiber wird auch die Kompatibilität mit anderer Bildverarbeitungssoftware verbessert. Wir hoffen, dass dies die Software-Integration für unsere Kunden noch einfacher machen wird.